
向量是什么
向量就是给定一个点A,连接原点到点A,并具有由O到A方向的连线,表示为
O
A
⃗
\vec{OA}
OA
. 书本的定义:向量就是具有大小和方向东西。
大小(magnitude)
向量的大小(magnitude)写作
∥
x
∥
\Vert x \Vert
∥x∥,称为模(norm). 通过(Pythagoras’ theorem)毕达哥拉斯定理求模如下图,
O
A
2
=
O
B
2
+
A
B
2
{OA}^2 = {OB}^2 + {AB}^2
OA2=OB2+AB2
O
A
2
=
3
2
+
4
2
{OA}^2 = {3}^2 + {4}^2
OA2=32+42
∥
x
∥
=
5
\Vert x \Vert = 5
∥x∥=5
方向(direction)
定义向量
u
(
u
1
,
u
2
)
\mathbf{u} (u_1,u_2)
u(u1,u2)的方向为向量
w
(
u
1
∥
u
∥
,
u
2
∥
u
∥
)
\mathbf{w}(\frac{u_1}{\|u\|}, \frac{u_2}{\|u\|})
w(∥u∥u1,∥u∥u2)。如下图:
可以看到:
c
o
s
(
θ
)
=
u
1
∥
u
∥
cos(\theta)=\frac{u_1}{\|u\|}
cos(θ)=∥u∥u1
c
o
s
(
α
)
=
u
2
∥
u
∥
cos(\alpha)=\frac{u_2}{\|u\|}
cos(α)=∥u∥u2 所以向量
u
(
3
,
4
)
\mathbf{u}(3,4)
u(3,4)方向向量是
w
(
0.6
,
0.8
)
\mathbf{w}(0.6,0.8)
w(0.6,0.8)。方向向量的模为1.如下图
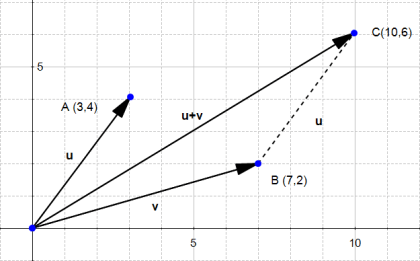
两个向量的加法
任意给给两个向量
u
(
u
1
,
u
2
)
\mathbf{u} (u_1, u_2)
u(u1,u2) ,
v
(
v
1
,
v
2
)
\mathbf{v} (v_1, v_2)
v(v1,v2)两个向量相加:
u
+
v
=
(
u
1
+
v
1
,
u
2
+
v
2
)
\mathbf{u}+\mathbf{v}= (u_1+v_1, u_2+v_2)
u+v=(u1+v1,u2+v2)
两个向量的减法
任意给给两个向量
u
(
u
1
,
u
2
)
\mathbf{u} (u_1, u_2)
u(u1,u2) ,
v
(
v
1
,
v
2
)
\mathbf{v} (v_1, v_2)
v(v1,v2)两个向量相减:
u
−
v
=
(
u
1
−
v
1
,
u
2
−
v
2
)
\mathbf{u}-\mathbf{v}= (u_1-v_1, u_2-v_2)
u−v=(u1−v1,u2−v2)。 方向指向被减数的方向。
向量的点积(dot product)
x
⋅
y
=
∥
x
∥
∥
y
∥
c
o
s
(
θ
)
\mathbf{x} \cdot \mathbf{y} = \|x\| \|y\|cos(\theta)
x⋅y=∥x∥∥y∥cos(θ),
θ
\theta
θ 为两个向量的夹角。 推导过程如下:
根据前面的分析我们知道,
c
o
s
(
β
)
=
a
d
j
a
c
e
n
t
h
y
p
o
t
e
n
u
s
e
=
x
1
∥
x
∥
cos(\beta) =\frac{adjacent}{hypotenuse} =\frac{x_1}{\|x\|}
cos(β)=hypotenuseadjacent=∥x∥x1
s
i
n
(
β
)
=
o
p
p
o
s
i
t
e
h
y
p
o
t
e
n
u
s
e
=
x
2
∥
x
∥
sin(\beta) =\frac{opposite}{hypotenuse} =\frac{x_2}{\|x\|}
sin(β)=hypotenuseopposite=∥x∥x2
c
o
s
(
α
)
=
a
d
j
a
c
e
n
t
h
y
p
o
t
e
n
u
s
e
=
y
1
∥
y
∥
cos(\alpha) =\frac{adjacent}{hypotenuse} =\frac{y_1}{\|y\|}
cos(α)=hypotenuseadjacent=∥y∥y1
s
i
n
(
α
)
=
o
p
p
o
s
i
t
e
h
y
p
o
t
e
n
u
s
e
=
y
2
∥
y
∥
sin(\alpha) =\frac{opposite}{hypotenuse} = \frac{y_2}{\|y\|}
sin(α)=hypotenuseopposite=∥y∥y2 从图片中得到
θ
=
β
−
α
\theta = \beta - \alpha
θ=β−α, 那么
c
o
s
(
θ
)
=
c
o
s
(
β
−
α
)
cos(\theta) = cos(\beta - \alpha)
cos(θ)=cos(β−α)
c
o
s
(
β
−
α
)
=
c
o
s
(
β
)
c
o
s
(
α
)
+
s
i
n
(
β
)
s
i
n
(
α
)
cos(\beta - \alpha) = cos(\beta)cos(\alpha) + sin(\beta)sin(\alpha)
cos(β−α)=cos(β)cos(α)+sin(β)sin(α) 于是,
c
o
s
(
θ
)
=
c
o
s
(
β
−
α
)
=
c
o
s
(
β
)
c
o
s
(
α
)
+
s
i
n
(
β
)
s
i
n
(
α
)
cos(\theta) = cos(\beta - \alpha) = cos(\beta)cos(\alpha) + sin(\beta)sin(\alpha)
cos(θ)=cos(β−α)=cos(β)cos(α)+sin(β)sin(α)
c
o
s
(
θ
)
=
x
1
∥
x
∥
y
1
∥
y
∥
+
x
2
∥
x
∥
y
2
∥
y
∥
cos(\theta) = \frac{x_1}{\|x\|}\frac{y_1}{\|y\|}+ \frac{x_2}{\|x\|}\frac{y_2}{\|y\|}
cos(θ)=∥x∥x1∥y∥y1+∥x∥x2∥y∥y2
c
o
s
(
θ
)
=
x
1
y
1
+
x
2
y
2
∥
x
∥
∥
y
∥
cos(\theta) = \frac{x_1y_1 + x_2y_2}{\|x\|\|y\|}
cos(θ)=∥x∥∥y∥x1y1+x2y2
∥
x
∥
∥
y
∥
c
o
s
(
θ
)
=
x
1
y
1
+
x
2
y
2
\|x\|\|y\|cos(\theta) = x_1y_1 + x_2y_2
∥x∥∥y∥cos(θ)=x1y1+x2y2
点积的算术定义就出来,
x
⋅
y
=
x
1
y
1
+
x
2
y
2
=
∑
i
=
1
2
(
x
i
y
i
)
\mathbf{x} \cdot \mathbf{y} =x_1y_1 + x_2y_2 = \sum_{i=1}^{2}(x_iy_i)
x⋅y=x1y1+x2y2=i=1∑2(xiyi) 从上面的集合定义也能知道,两个向量的点积是一个数。
向量的正交投影
如图给定两个向量x,y,那么向量x在y上的投影为z。 通过上面的学习我们知道,
c
o
s
(
θ
)
=
∥
z
∥
∥
x
∥
cos(\theta)= \frac{\|z\|}{\|x\|}
cos(θ)=∥x∥∥z∥
∥
z
∥
=
∥
x
∥
c
o
s
(
θ
)
\|z\|=\|x\|cos(\theta)
∥z∥=∥x∥cos(θ) 点积
c
o
s
(
θ
)
=
x
⋅
y
∥
x
∥
∥
y
∥
cos(\theta) = \frac{\mathbf{x} \cdot \mathbf{y}}{\|x\|\|y\|}
cos(θ)=∥x∥∥y∥x⋅y 于是可以推导得
∥
z
∥
=
x
⋅
y
∥
y
∥
\|z\|=\frac{\mathbf{x} \cdot \mathbf{y}}{\|y\|}
∥z∥=∥y∥x⋅y 另外我们知道方向向量的,如果u表示向量y的方向向量,
u
=
y
∥
y
∥
\mathbf{u}=\frac{\mathbf{y}}{\|y\|}
u=∥y∥y, 那么向量x在向量y上面的投影可以由下式计算:
∥
z
∥
=
u
⋅
x
\|z\|=\mathbf{u} \cdot \mathbf{x}
∥z∥=u⋅x
我们还注意到,向量x在向量y上的投影得到的向量z,它的方向向量和向量y的方向向量是一致的,所以向量z可表示为
z
=
∥
z
∥
u
\mathbf{z}=\|z\|\mathbf{u}
z=∥z∥u。
知道了向量x在向量y上面的投影z后,我们就能够计算向量x-z的距离:
∥
x
−
z
∥
=
(
3
−
4
)
2
+
(
5
−
1
)
2
=
17
\|x-z\| = \sqrt{(3-4)^2 + (5-1)^2}=\sqrt{17}
∥x−z∥=(3−4)2+(5−1)2
=17
详见原文地址:https://www.svm-tutorial.com/2014/11/svm-understanding-math-part-2/